Feedforward and ratio control
Advanced Modeling and Control
Feedback control advantages
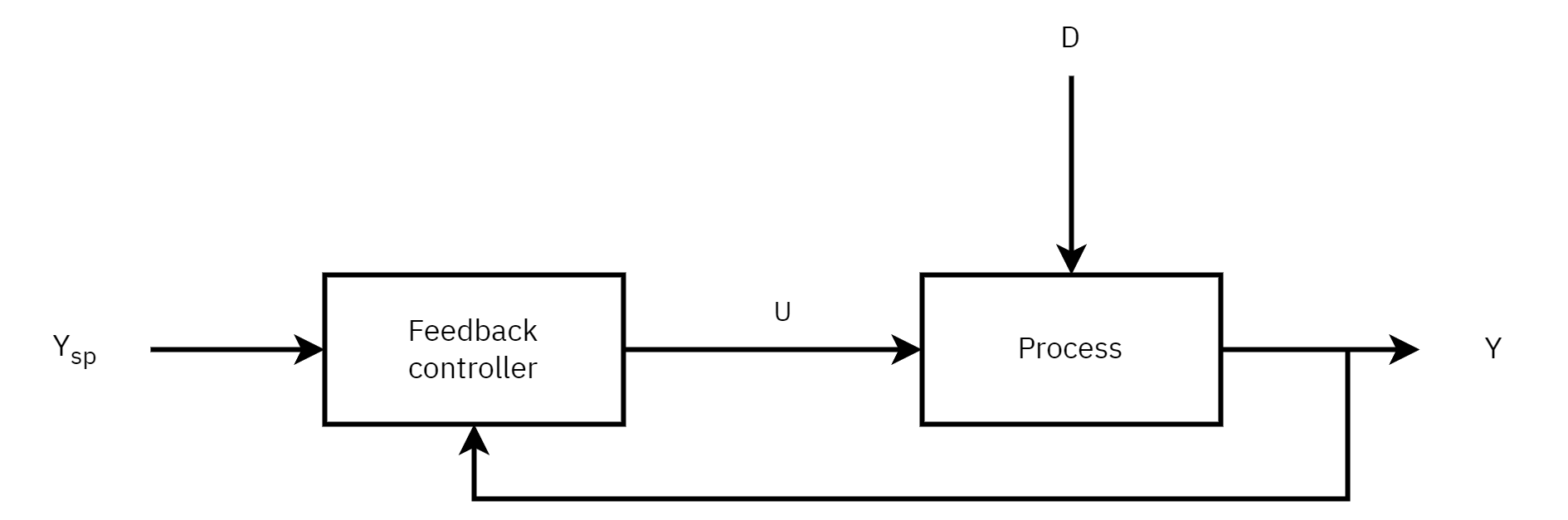
- Corrective action occurs as soon as the controlled variable deviates from the set point, regardless of the source and type of disturbance.
- Feedback control requires minimal knowledge about the process to be controlled; in particular, a mathematical model of the process is not required, although it can be very useful for control system design.
- The ubiquitous PID controller is both versatile and robust. If process conditions change, re-tuning the controller usually produces satisfactory control
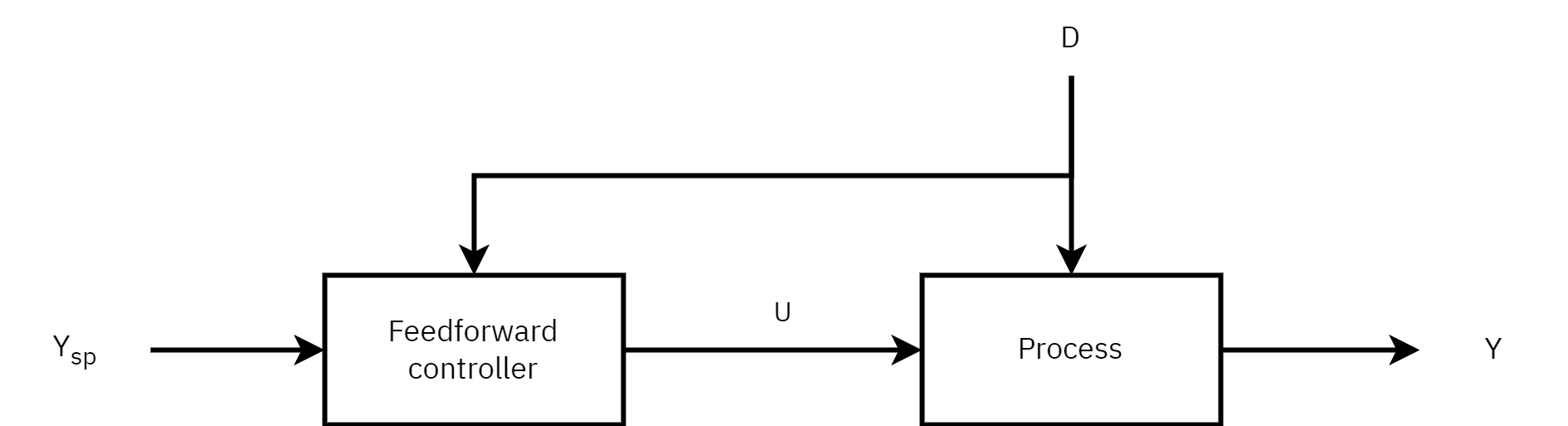
Introduction to feedforward control
The basic concept of feedforward control is to measure important disturbance variables and take corrective action before they upset the process.
In contrast, a feedback controller does not take corrective action until after the disturbance has upset the process and generated a nonzero error signal.
Feedforward control configuration
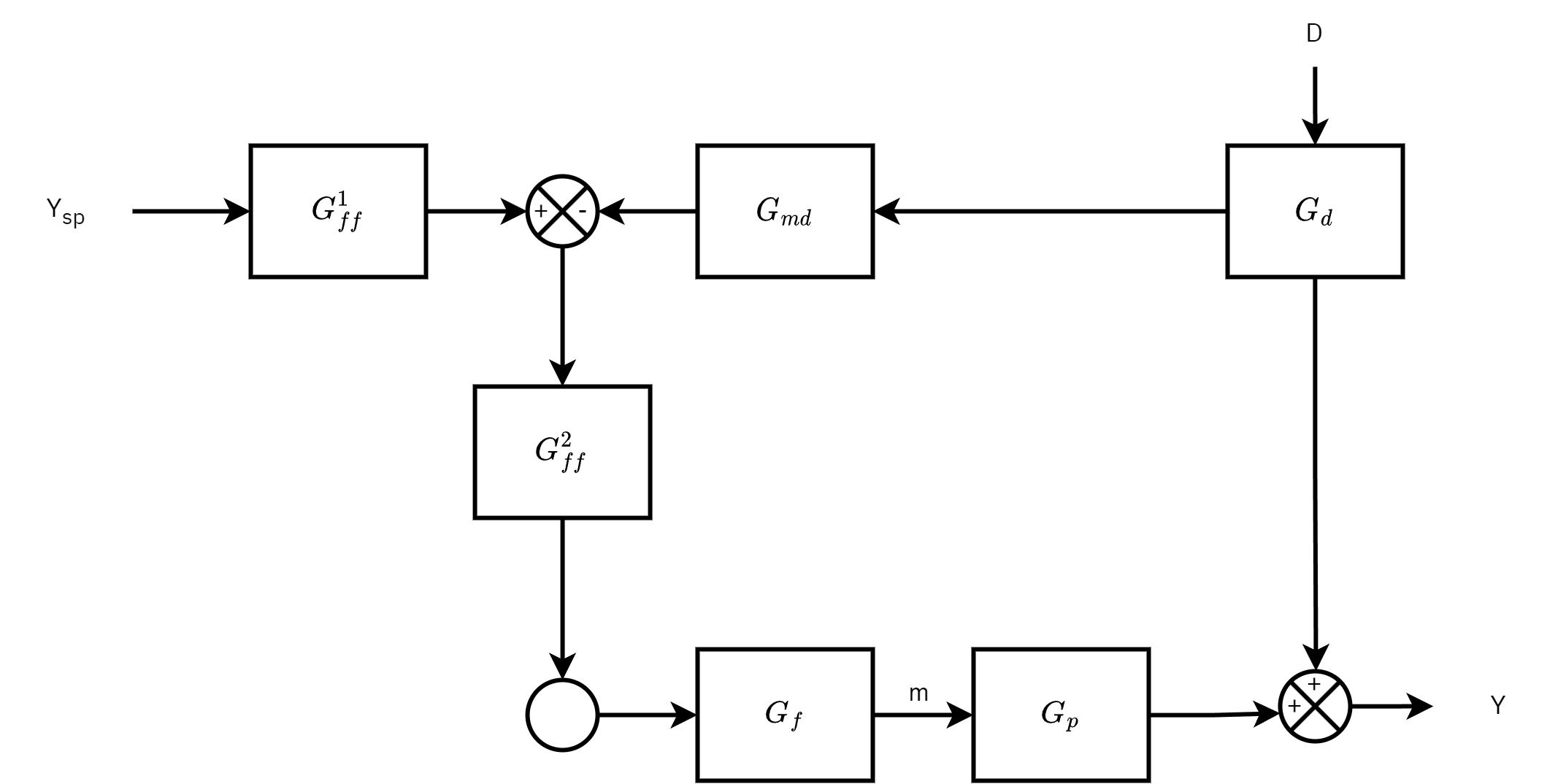
Feedforward control configuration
Transfer functions G^1_{ff} = \frac{G_{md}}{G_d}; G^2_{ff}=-\frac{G_d}{G_p G_f G_{md}}
Neglecting dynamics of final control element and sensor
G^1_{ff} = \frac{1}{G_d}; G^2_{ff}=-\frac{G_d}{G_p}
Sometimes idealized feedforward controller cannot be realized physically due to non-causal system
Feedforward-Feedback control configuration
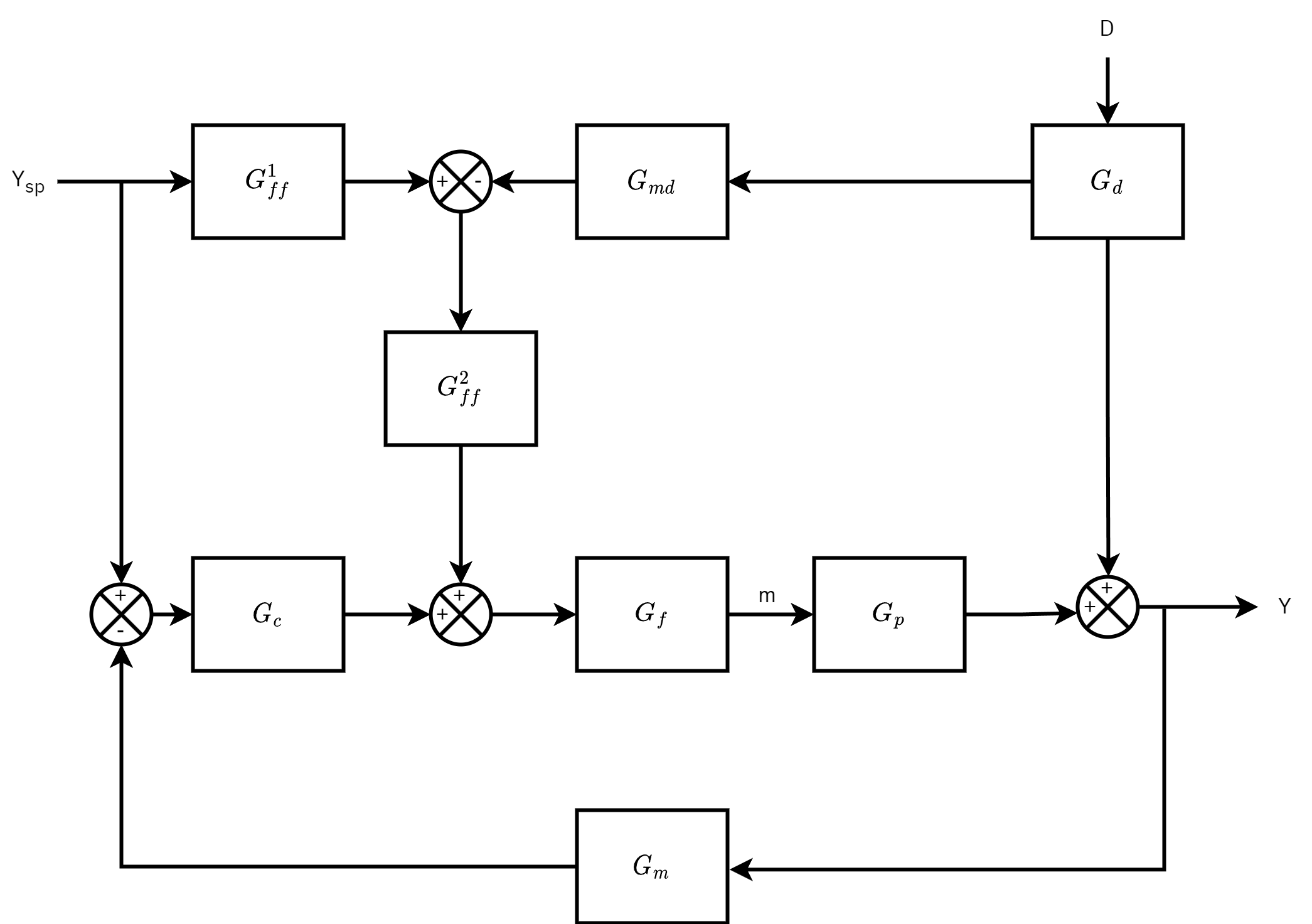
Feedforward-Feedback control configuration
- Closed loop transfer function
\begin{split} y(s) = & \frac{G_p G_f [G^2_{ff} G^1_{ff} + G_c]}{1 + G_p G_f G_c G_m} y_{sp}(s) \\[1ex] & + \frac{G_d - G_p G_f G^2_{ff} G_{md}}{1 + G_p G_f G_c G_m} d(s) \end{split}
- Characteristic equation for this closed-loop system
1 + G_p G_f G_c G_m = 0
Ratio control schemes
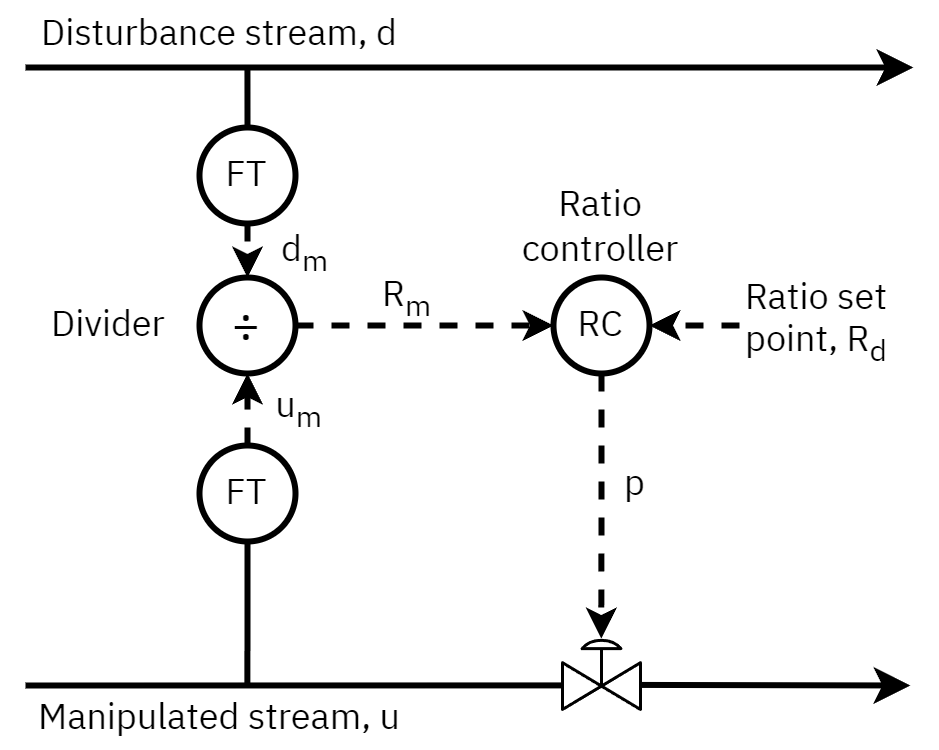
Method 1
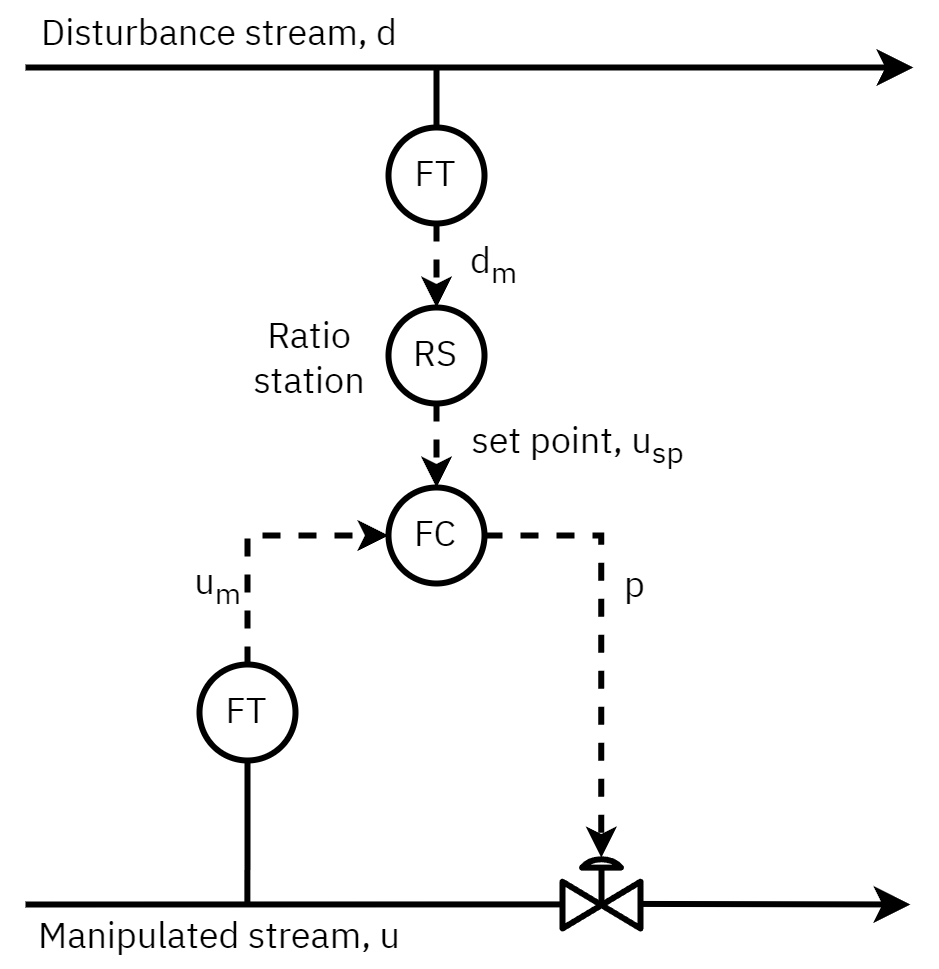
Method 2